Projects
[2021] Develop a Machine Learning Model (Random Forest) For Measuring Video Quality of Experience (QoE) in Encrypted Traffic.
This project addresses the challenges of estimating the Quality of Experience (QoE) in encrypted traffic. Popular video providers such as YouTube, Netflix, Amazon Prime, Disney, and Vimeo have mostly encrypted video traffic, which poses additional challenges for the network operator to perform essential tasks to inspect compressor balance traffic. We address the aforementioned problem using a machine-learning model that predicts video QoE from encrypted traffic. We have selected a random forest classifier and trained the model in Python using the scikit-learn library. The learned model is imported in C++ using the Python scikit-learn porter library. The proposed machine learning model in C++ was able to identify quality issues from encrypted data with an accuracy of 90.5% for a range of encrypted video services with real-time traffic.
Technologies: C++, CMake, Python, SckitLearn, Linux
[2021] Analyze and Develop Network Intelligence and Security Engine (NISE) Validation Modules in C++ and Linux.
This project configured and implemented Network Intelligence and Security Engine (NISE) APIs in Linux with C++, serialized and deserialized them using Google protocol buffers. Writing manual Unit Test cases for NISE APIs using Google Test framework and preparing documentation with MarkDown Language.
Technologies: C++, CMake, Gtest, Linux, protobuf, Valgrind
[2020] Aggregation And Dispersion For Swarm of Mobile Robots Using ROS And Gazebo.
The project implements Aggregation and Dispersion for swram of mobile robots.
Technologies: C++, Python, Robot Operating System (ROS), Linux (Ubuntu), Gazebo
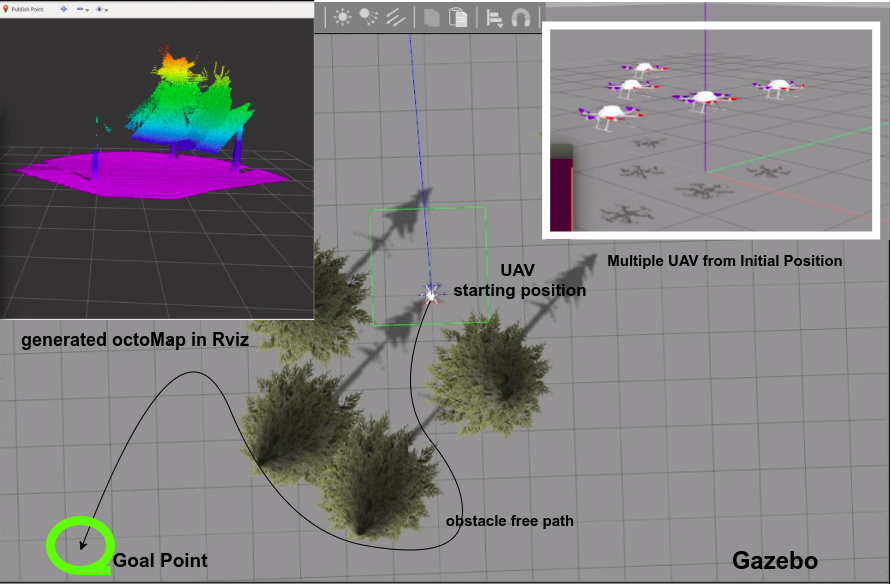
[2020] Unmanned Aerial Vehicle (UAV) Path Planning in Dynamic Environment with Rapid Exploration Random Trees (RRT*) and OCTOMAP.
The project develop simulation for UAV Path Planning in Dynamic Environment with Rapid Exploration Random Trees (RRT*) and OCTOMAP using ROS and Gazebo.
Technologies: C++, Python, Robot Operating System (ROS), Linux (Ubuntu), Gazebo
[2020] Simulations For ORB SLAM On Unmanned Aerial Vehicle (UAV) Using ROS And Gazebo.
The project develop simulations for ORB SLAM on Unmanned Aerial Vehicle using ROS and Gazebo.
Technologies: C++, Python, Robot Operating System (ROS), Linux (Ubuntu), Gazebo
[2020] Simulations For Swarm of Unmanned Aerial Vehicle (UAV) Using ROS And Gazebo.
The project develop Simulations For swarm of Unmanned Aerial Vehicle (UAV) Using ROS And Gazebo.
Technologies: C++, Python, Robot Operating System (ROS), Linux (Ubuntu), Gazebo
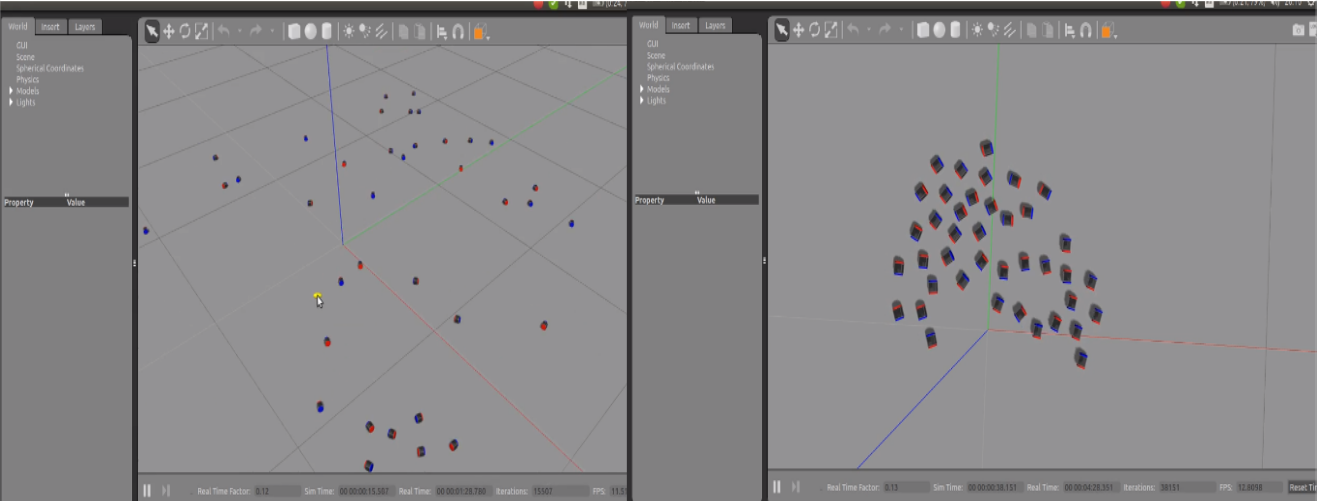
[2020] Design And Develop Simulations For Swarm of Unmanned Underwater Vehicles Using ROS And Gazebo.
The project develop simulation for Swarm of ROV using ROS and Gazebo.
Technologies: C++, Python, Robot Operating System (ROS), Linux (Ubuntu), Gazebo
Novel Learning from Demonstration Approach For Repetitive Teleoperation Tasks . [Publication Link]
The project is funded by the German Research Foundation (DFG) and the Industrial Strategic Technology Development Program (10069072) MOTIE, South Korea. Done in Collaboration with Human Assistive Robotics Group at TUM, Germany, published in 2017 IEEE World Haptics Conference Munich, Germany, and ranked top 10%..
Abstract: While teleoperation provides a possibility for a robot to operate at extreme conditions instead of a human, teleoperating a robot still demands a heavy mental workload from a human operator. Learning from demonstrations can reduce the human operator’s burden by learning repetitive teleoperation tasks. However, one of challenging issues is that demonstrations via teleoperation are less consistent compared to other modalities of human demonstrations. In order to solve this problem, we propose a learning scheme based on Dynamic Movement Primitives (DMPs) which can handle less consistent, asynchronized and incomplete demonstrations. In particular we proposed a new Expectation Maximization (EM) algorithm which can synchronize and encode demonstrations with temporal and spatial variances, different initial and final conditions and partial executions. The proposed algorithm is tested and validated with three different experiments of a pegin-hole task conducted on 3-Degree of freedom (DOF) masterslave teleoperation system.
Technologies: C++, Python, Matlab, Scikit learn
Soft continuum growing robot simulation in a virtual environment .
This project develop simualtion for soft continuum growing robot in unity game engine. This project is done in collaboration with CHARM Lab Standford University, USA, and supported by the US Department of Defence and Republic of Korea’s Ministry of Trade, Industry, and Energy (MOTIE).
Technologies: C#, Unity Game Engine